Now second-time competitors in the Skills Canada National Robotics Competition, we strived to create smarter and better designs while keeping the principles simple and easy to implement. This is what Michael and I came up with…
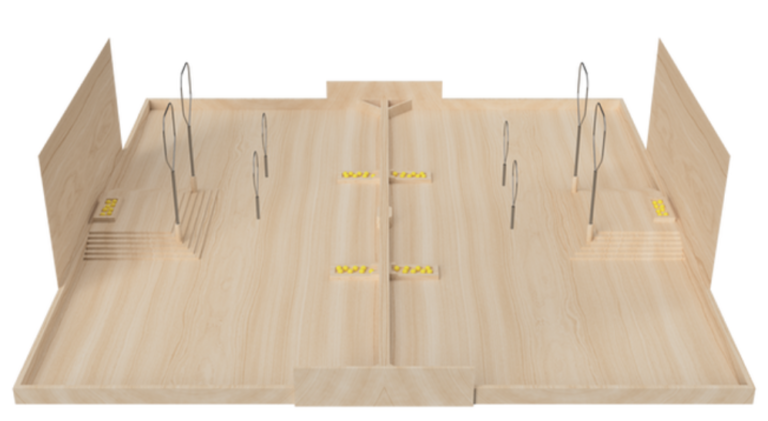
The game is a battle between two teams. Each team has one side which they cannot leave. The goal is to get all of the balls (foam golf balls) from your side over to the other team’s side. The robots start on the top platform of The Citadel. The balls initially start in three different cradles. Your team’s score is found by tallying up the balls on the other team’s floor (1pt per ball), their big nets (2pts per ball), and their small nets on their robots (3pts per ball). 10pts are also rewarded if all teleoperated robots successfully leave and return to the citadel by the end of the 3 minute game. The challenges of the game are moving up and down The Citadel, collecting the balls from the cradles, precisely launching the balls into the other team’s nets, and dodging balls the other team is firing at you. All robots must fit in a 4ft^3 boxed volume.
The four smaller fishing nets in the center region are representing the net that are on each robots and the height and size they are required to be at.
The cradles store the yellow foam golf balls. Using these
The steps are called "The Citadel". It is where the robots must start. If they return to the top before the end time, the team gets 10points
Provincial Competition:
After winning gold at this competition, we solved a few issues and started practicing for nationals. The Center of Gravity was very far back because of the motors, net, batteries and electronics being there. When going up the stairs, the robot tipped occasionally. We added a solid bar of brass to the front. Also, we changed our wheels to more grippy ones. These fixes combined made the robot perform much better on the stairs.
The winning Design
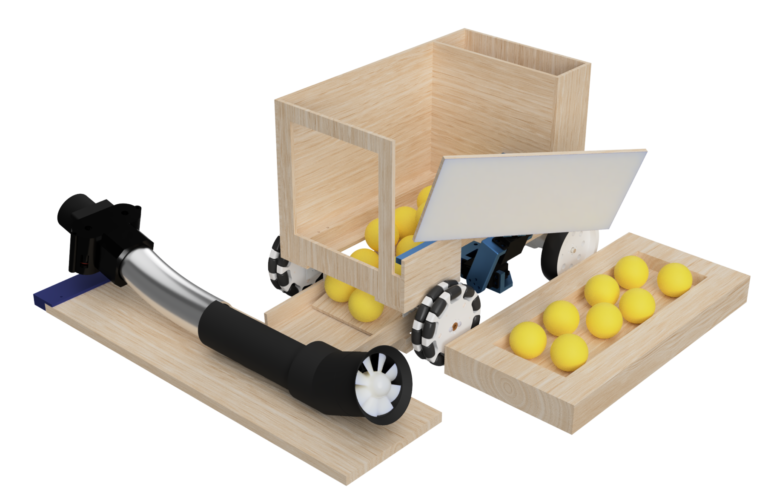
This is our Mobile Robot which is used to move up and down the citadel and collect all the foam golf balls with ease. The entire robot is controlled with a PS4 controller and also is required to have a net placed into the back black pipe for the opponent to score on. The main tool of this robot is its paddle which is on a 2 axis servo assembly. The red and white pattern on the paddle is a sticky mouse trap that has been modified to have the perfect amount of stickiness. When the robot is driven up next to one of the full cradles, the sticky plate is rotated down so that the sticky side touches the balls, then is lifted up and rotated on its other axis so now the sticky side with all the balls is facing inside the robot. After this, a servo-controlled wiper is triggered to clear the balls from the sticky plate simply by knocking them off so they fall into the robot’s ball storage area. Once all the balls in the cradles are collected, the robot drives back up the stairs to dump the balls into our stationary robot which will shoot them to the other team’s large nets. On the bottom of the mobile robot, there is a trap door which all the contained balls will fall through onto the stationary robot’s ramp. Continue reading below…
To the left is our stationary autonomous robot. It is turned on at the beginning of a round and isn’t turned off until the end. This makes it autonomous and is not required to carry a net. It is placed at the top of the citadel, aligned with the corner edge of the top floor. The balls roll out of the mobile robot onto the ramp, where then gravity and the force of the other balls push themselves into the blower tube. The air is directed perfectly to allow the balls to flow into the flywheels. The flywheel assembly is pre aimed at the opponent’s stationary large nets during warm-up. The flywheels are aimed using a flexible car exhaust pipe which provides stability when set to the desired position. The flywheels are two counter-rotating drone motors that have been designed to be the perfect distance apart, allowing for optimal jam reduction and shooting accuracy. These two robots work in tandem to score the most points of all provincial competition games. We had a lead of nearly 3x the nearest competitor in overall points.