I was the electrical team lead of the Dalhousie Microtransat Autonomous Sailboat Team for a few years. We are a team of Dalhousie students designing and building a sustainable, autonomous sailboat that will sail itself to across the Atlantic Ocean as part of international competition. I was also previously the software team lead.
The sailboat I am helping build.
Our boat Nautono will have its power supplied by an array of 25Ah lithium-iron-phosphate batteries and a few solar panels summing to 40W. Nautono’s hull is made of carbon fibre and the boat uses a free-wing sail for propulsion and a rear rudder for directional control. The sailboat will transmit telemetry data logged every few minutes using the Iridium satellite network; this allows the sailboat’s path and diagnostic information to be tracked live on a website for all to spectate!
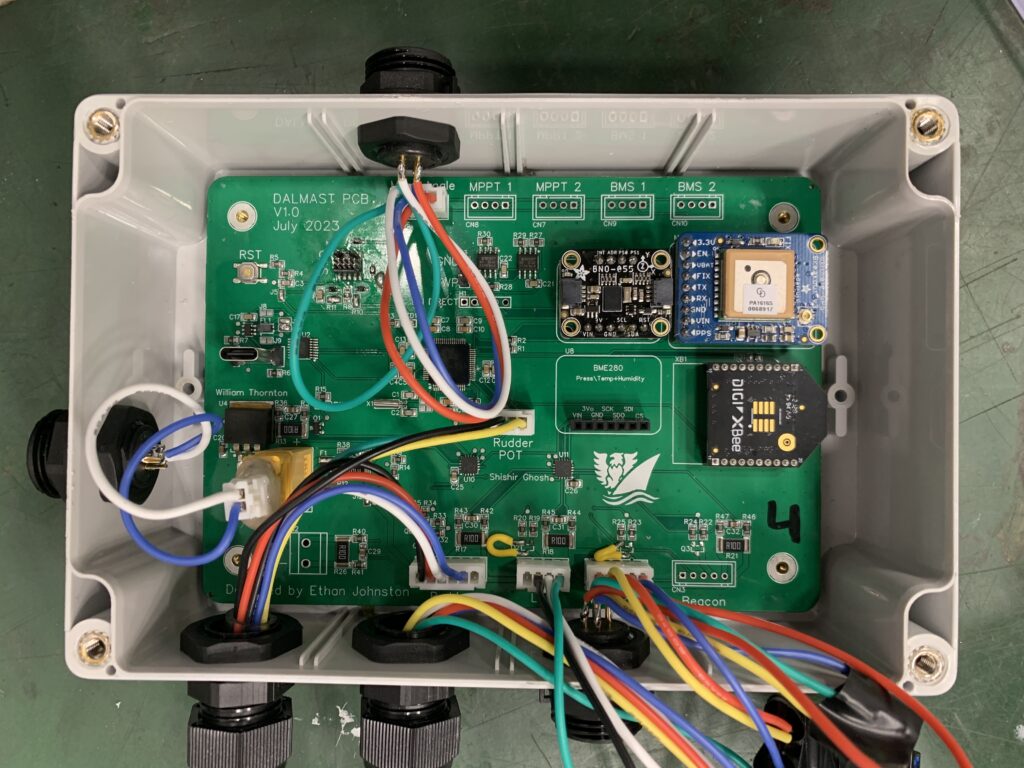
Nautono runs on a SAMD20 Atmel microprocessor with embedded C code for autonomous navigation developed by the team. This software will allow the boat to traverse the ocean without human interaction or intervention. A set of pre-programmed waypoints and real-time wind, GPS, and compass data will be used as input to the navigation algorithm. The navigation software will then change the position of the rudder and sail flap to maintain the boat on its intended trajectory.
Check out the Instagram for up to date information on the boat!
• Linear actuator control for sail flap position control. • Angle Sensor for mast rotary angle. • DC Motor with coupled potentiometer for rudder control. • GPS for geographical location. • Windvane for relative wind speed and direction. • Iridium Beacon for satellite telemetry uplink. • IMU for absolute heading (yaw), pitch, and roll. • XBee Radio for remote control within ~200m range. • EEPROMs to store preprogrammed waypoints and log data. • USB Virtual COM Port for debug messages. • SWD programming and debugging. • Future device support (BMS’s, MPPT charge controller monitoring) • Power toggling for high power consumption devices. • Power logging for high power consumption devices. • 4S LiFePo4 battery (12V avg) to 3.3V voltage regulation. • 32kHz RTC. • ESD protection on USB and SWD connections.
Battery
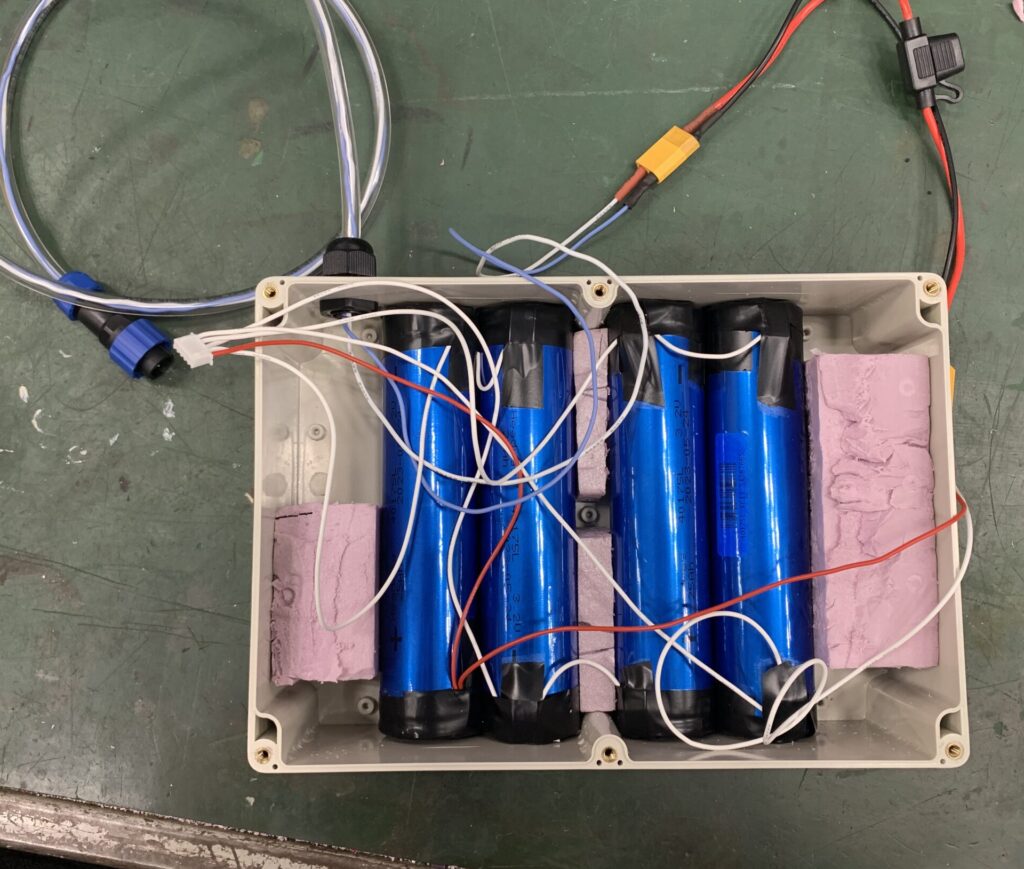
We chose 40175 25Ah 3.2V LiFePO4 cylindrical cells for their size and safety, making them ideal for water-based applications due to their tolerance to over and under-discharging. To ensure redundancy, we will create two packs of 4 cells each for our boat (4S1P). The LiFePO4 cells’ thermal stability and wide operating temperature range make them safe and suitable for marine environments. Additionally, their long cycle life reduces maintenance costs and ensures a reliable power supply during various voyages. The cells’ inherent safety features and ability to handle over and under-discharging provide peace of mind during extended journeys. With this thoughtfully designed power solution, we can confidently embark on marine adventures with a reliable and efficient electrical system. Paired with 40W of solar, I would say this is a definite improvement over the last boat which used a couple dozen non-rechargeable, D-cell, Lithium Thionyl Chloride (Li-SOCI2) batteries. These are scary.
The battery on the left is just a prototype used for testing. A more refined version will be created for the final boat.
Display model & test model
A 1/3rd scale model of the sailboat
A system which simulates how the sail behaves in windy environments. Used when creating the sailing algorithm.